Flow
2025年9月21日大约 5 分钟
Flow
概念
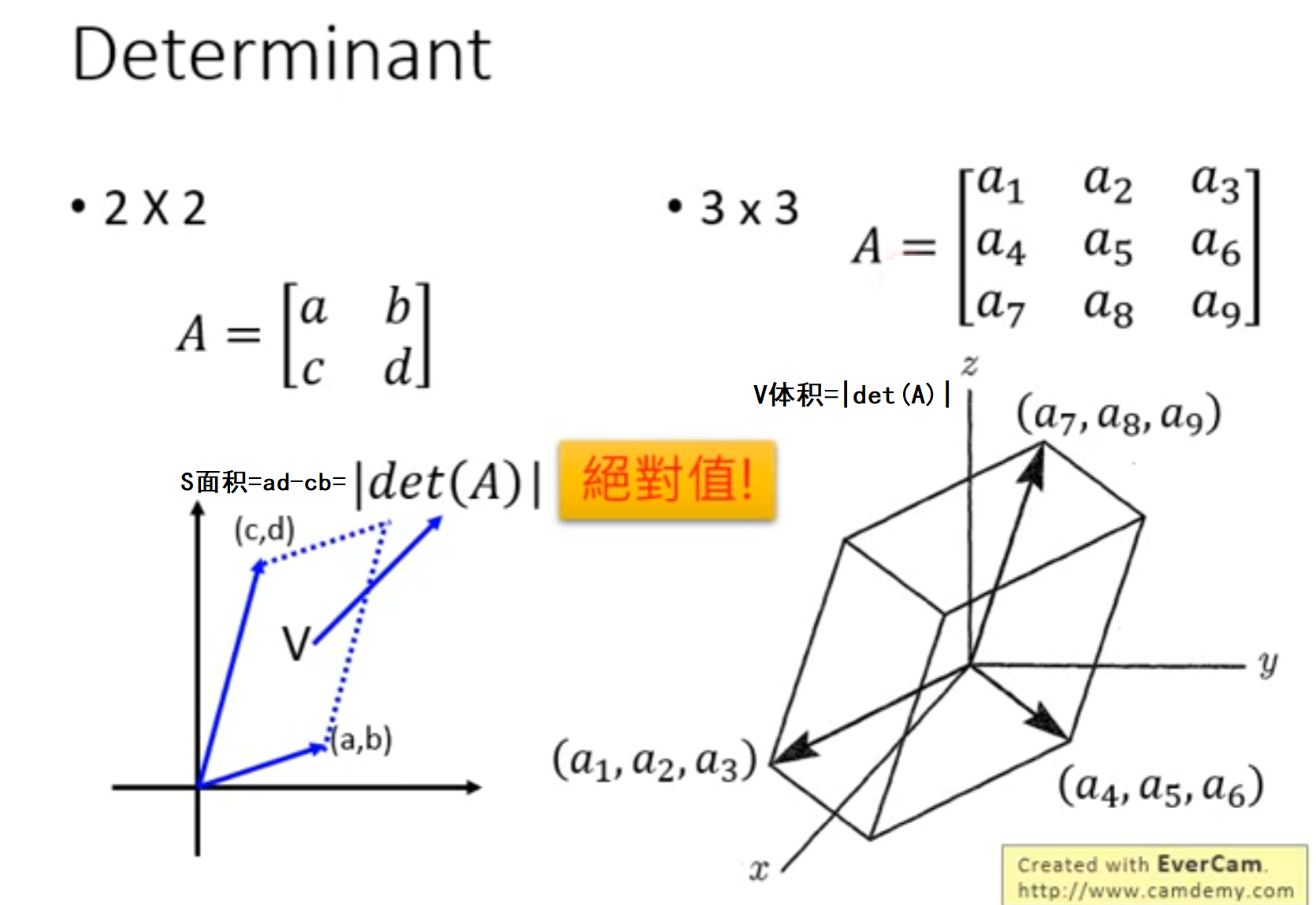
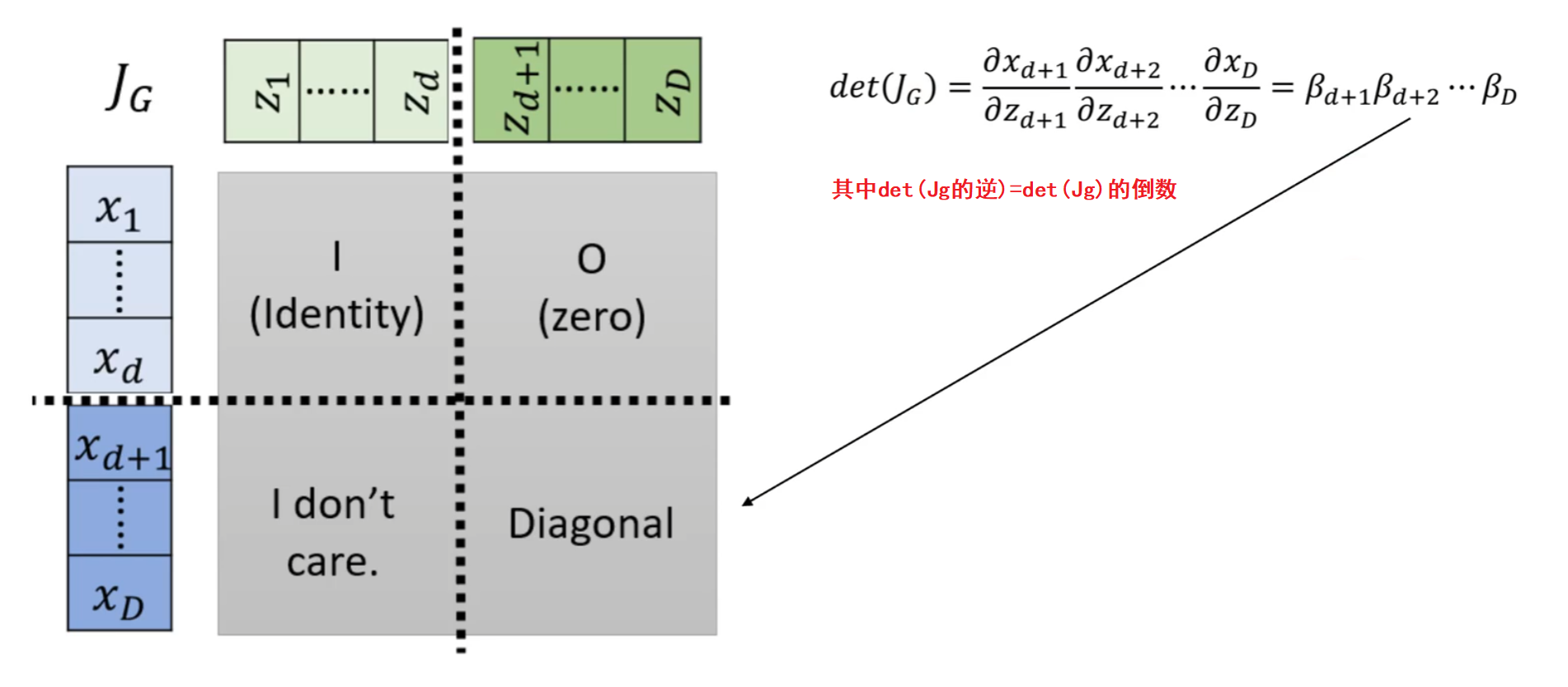
行列式在向量中的意义
- 二维:若存在向量(a,b),(c,d)则它们的行列式的值代表二维空间中的面积
- 三维:若存在向量(a1,a2,a3),(a4,a5,a6),(a7,a8,a9)则它们的行列式的值代表构成的三维空间的体积
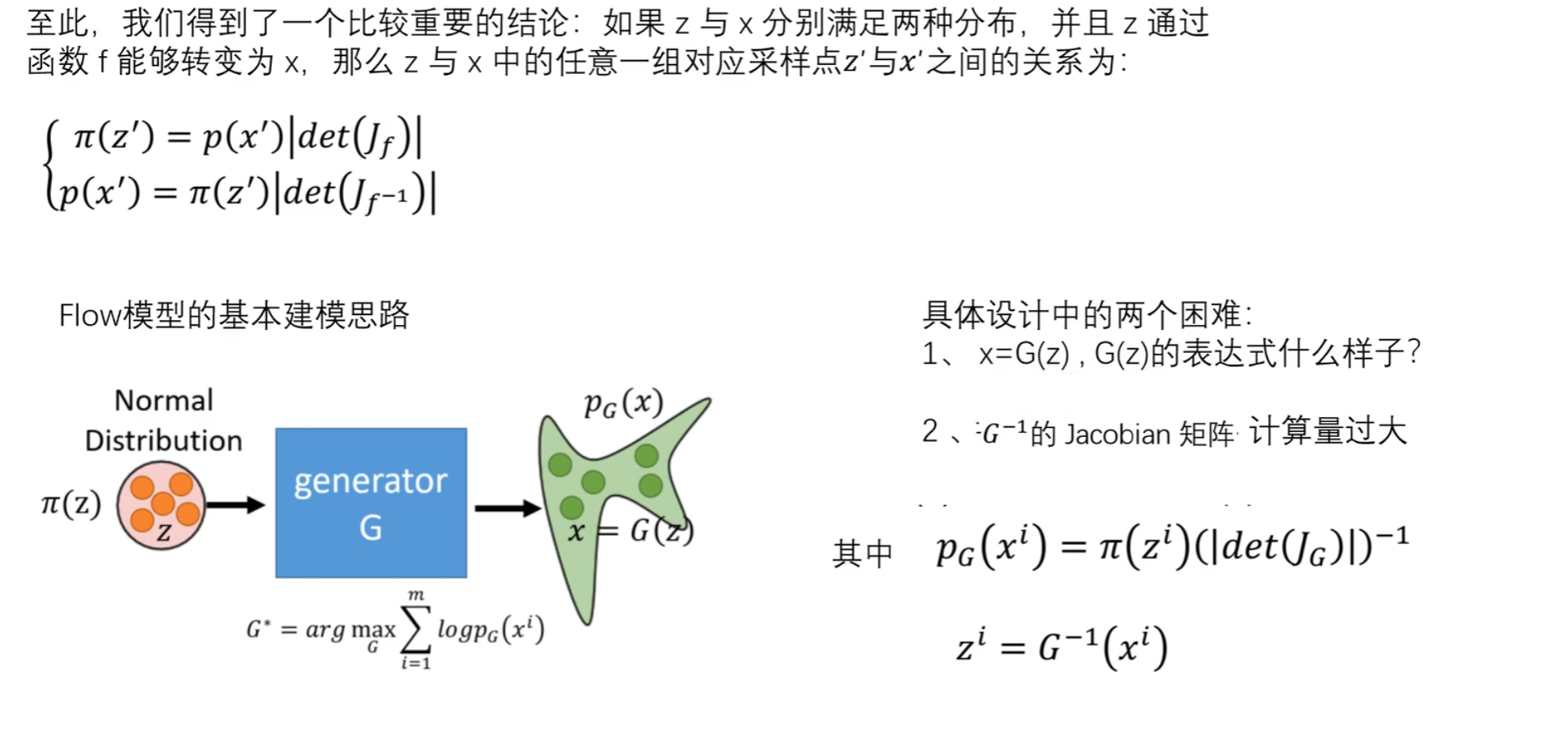
建模思想
给定两组数据z和x,其中z服从已知的简单先验分布π(z)(通常是高斯分布),x服从复杂的分布p(x)(即训练数据代表的分布),现在需要找到一个变换函数f,它能建立一种z到x的映射f。
如果这个变换函数能找到的话,那么就实现了一个生成模型的构造。如果想要有新的生成,只需要从π(z)中随机采样一个点,然后通过映射f,就可以得到新的样本点x。
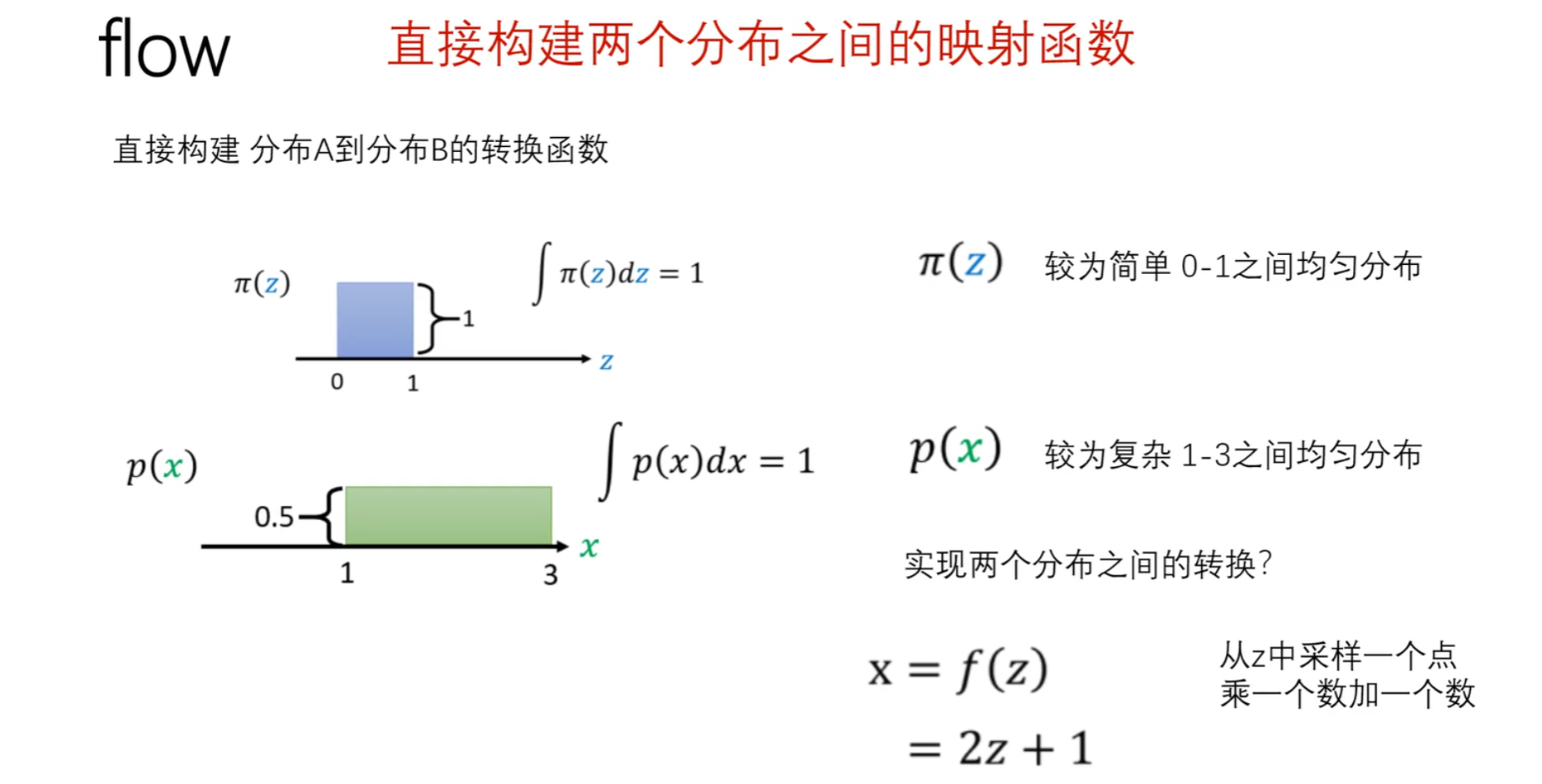
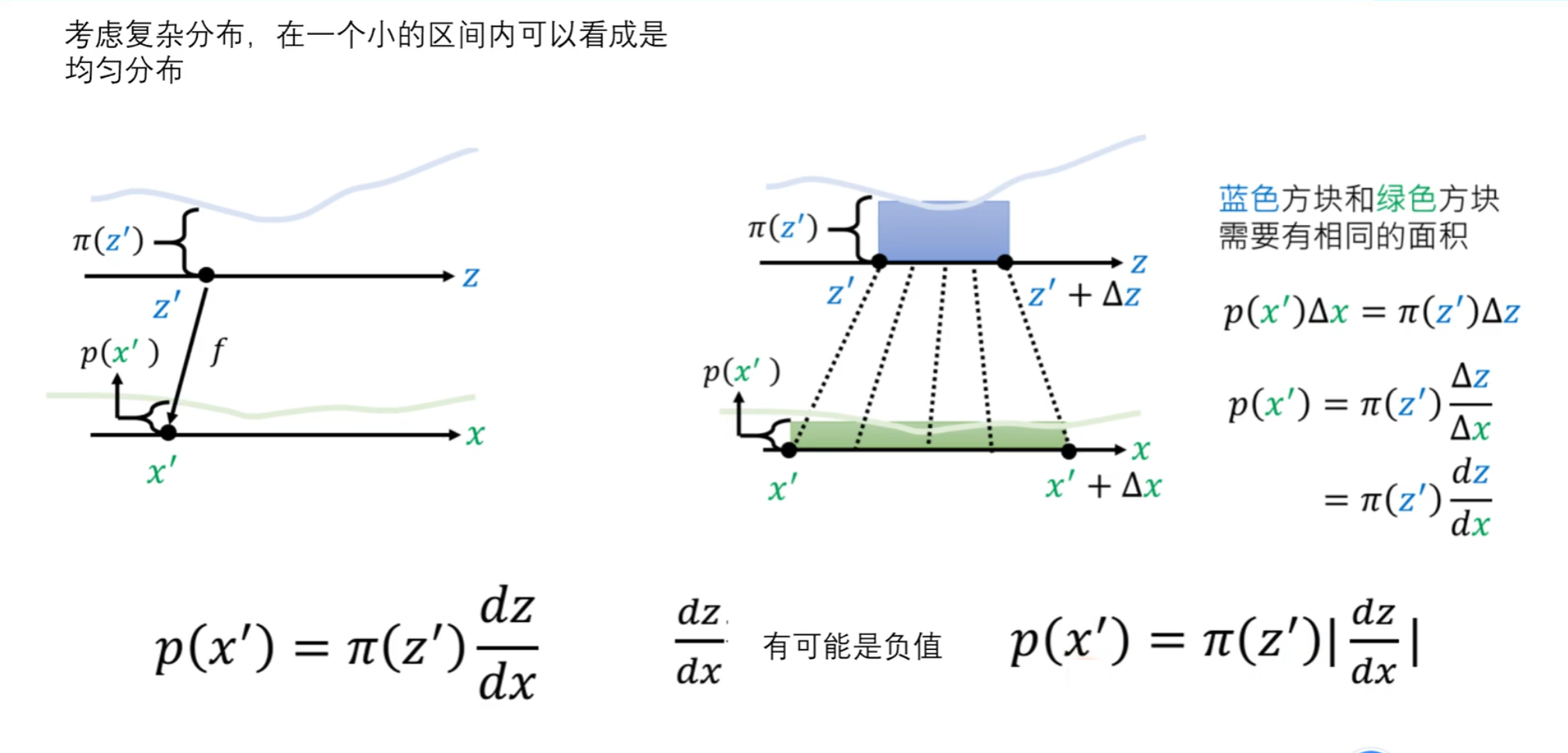
复杂分布
要将蓝色方块分布转换为绿色方块分布,前提必须保证蓝色方块和绿色方块面积一样
在高维下的转换
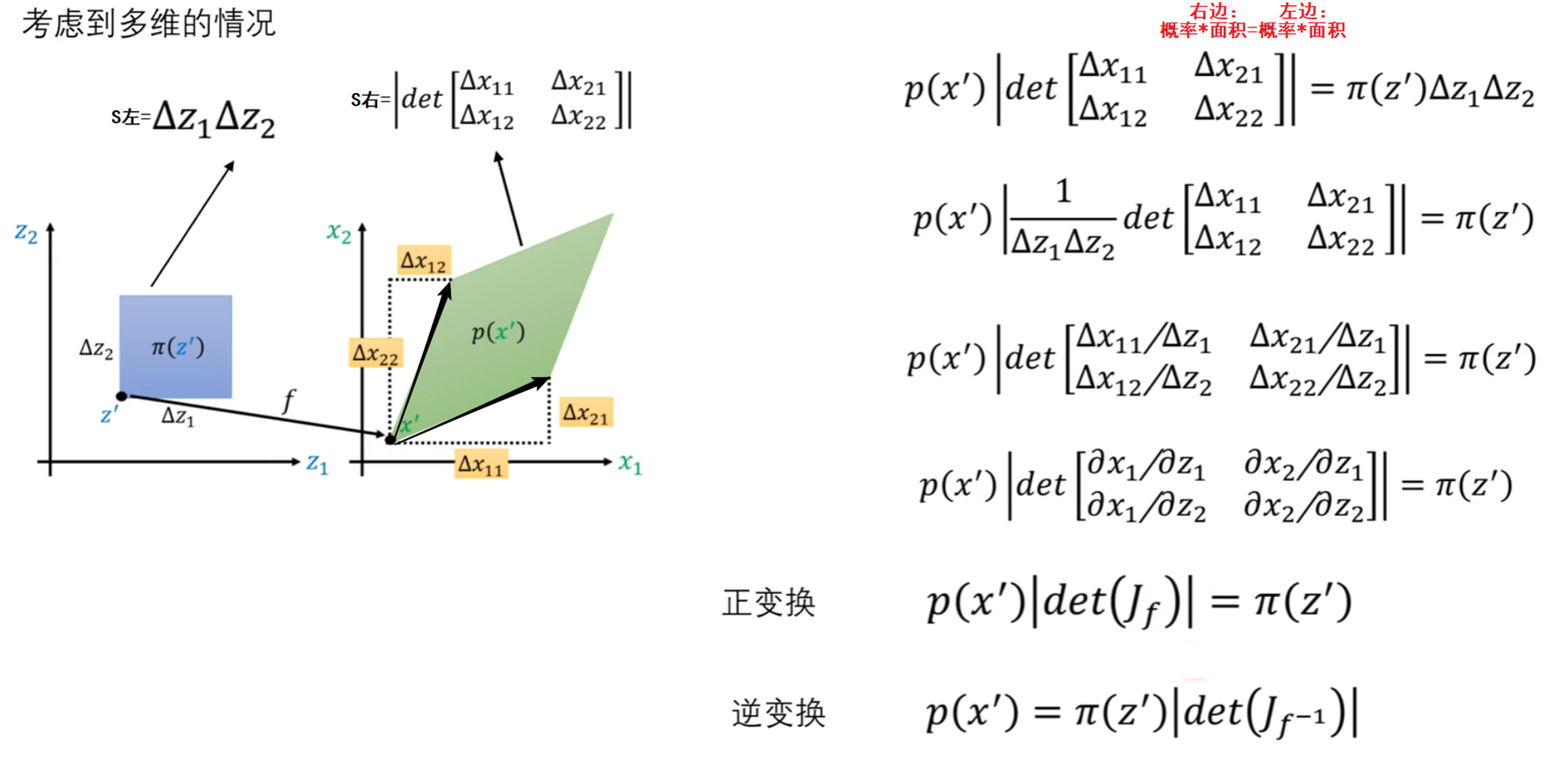
即 P(x')|Jf|=π(z')是从z'分布映射到x'分布
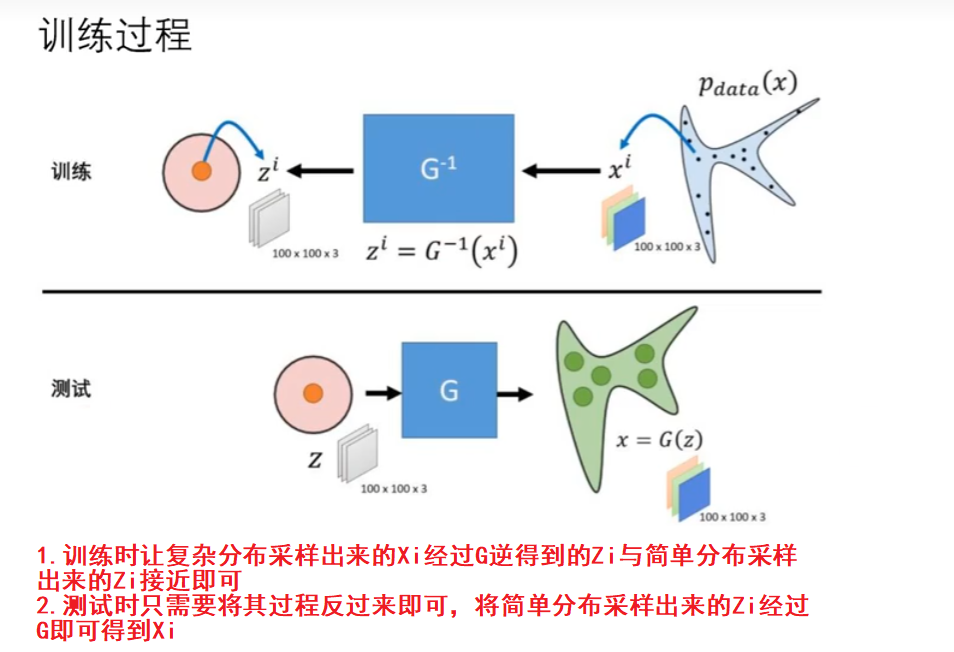
训练过程
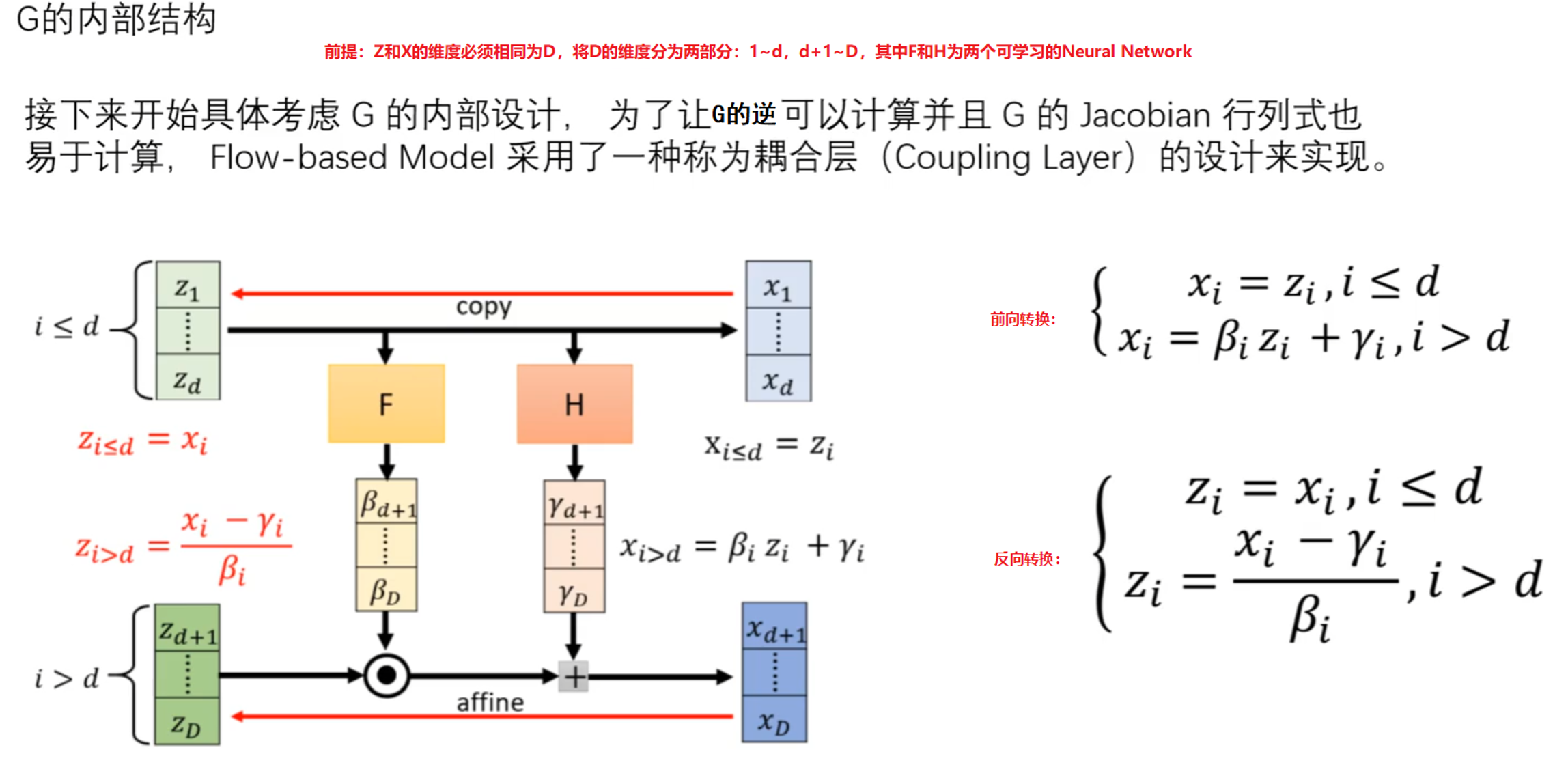
内部结构
最终结构(重点)
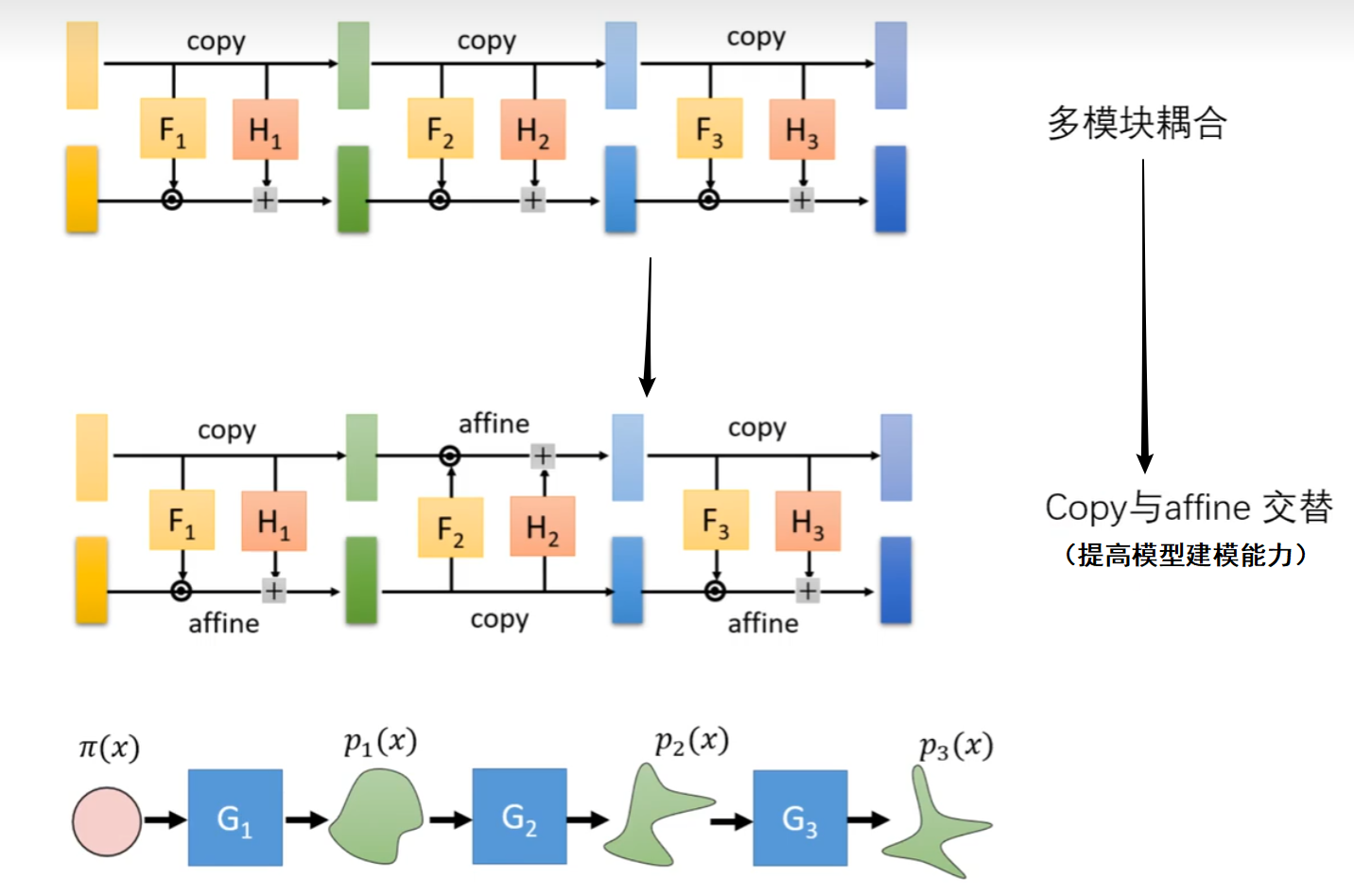
Coupling Layers
Coupling Layers 是流式模型中的一种变换层,是 RealNVP 和 Glow中广泛使用的结构,用于实现可逆变换和复杂数据分布的建模,用于对输入数据进行仿射变换。
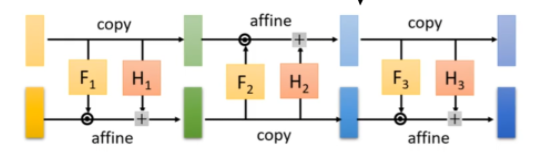
基本思想是将输入数据分成两部分,一部分保持不变,另一部分则在前一部分的条件下进行变换。这种设计确保了变换的可逆性,即可以从输出数据精确地恢复原始输入数据。
Coupling Layer的两个组成部分
前提要求:归一化流模型需要保持变换的可逆性,以便能够从变换后的数据中恢复原始数据。这要求每个变换都具有明确的反向变换。
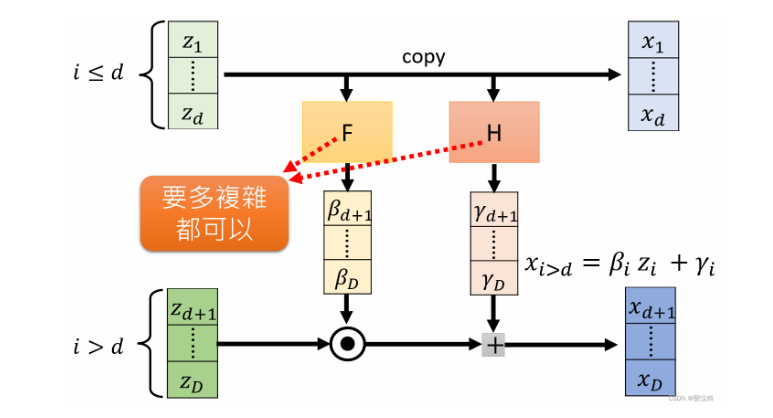
- 分割:将输入数据分成两部分(如X1和X2),其中一部分决定如何变换另一部分,通过这种分割,可以对数据进行局部化处理,使得模型能够学习到更细致的数据特征和变化。
- 条件变换:使用一部分数据(如 X1)来生成变换参数(如 shift 和 scale),然后对另一部分数据(如 X2)进行变换。这使得变换过程是可逆的。我们可以从变换后的数据中恢复出原始数据,这对生成模型和密度估计尤其重要。
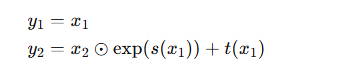
正向变换
反向变换
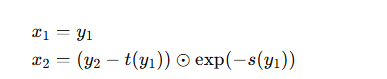
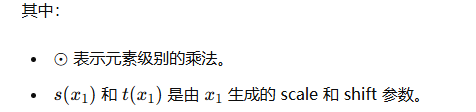
注意:其中的s( · )和t( · )可以采用复杂的neural network来增加转换的复杂性,使得模型能够学习复杂的数据分布并保持变换的可逆性。
Coupling Layer生成Mnist
仿射变换层
logs_flow等同于F后得到的参数, m_flow等同于H后得到的参数,只是这里F和H是同一个Neural Network(代码中 self.enc + self.post的部分,这里为了方便起见,将它们写在一起 )并不是两个复杂的Neural Network
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
import torchvision.utils as vutils
import os
class CouplingLayer(nn.Module):
def __init__(self, channels, hidden_channels):
super().__init__()
self.pre = nn.Linear(channels // 2, hidden_channels)
self.enc = nn.Sequential(
nn.Linear(hidden_channels, hidden_channels),
nn.ReLU(),
nn.Linear(hidden_channels, hidden_channels)
)
self.post = nn.Linear(hidden_channels, channels)
def forward(self, x, reverse=False):
# 将输入维度channels=128分成两半,第一半是X0,第二半是X1
x0, x1 = torch.split(x, x.size(1) // 2, dim=1)
if not reverse:
# 将前一半维度64投影到256的维度
h = self.pre(x0)
# 编码操作,维度不变
h = self.enc(h)
# 将维度从256将为128
stats = self.post(h)
# 将128投影回原始通道数64
# m_flow、logs_flow是由X0决定的,可以通过训练来学习这些变换参数。可以让模型能够根据输入数据的不同自动调整变换方式。
m_flow, logs_flow = torch.chunk(stats, 2, dim=1)
# 利用X0的结果对x1进行仿射变换,flow的数学公式
x1 = m_flow + x1 * torch.exp(logs_flow)
# 推理的时候
else:
h = self.pre(x0)
h = self.enc(h)
stats = self.post(h)
m_flow, logs_flow = torch.chunk(stats, 2, dim=1)
# 同样的仿射变换逆变换
x1 = (x1 - m_flow) * torch.exp(-logs_flow)
x = torch.cat([x0, x1], dim=1)
return xFlow模型结构
class Flip(nn.Module):
def forward(self, x,reverse=False):
# 将维度的前一半和后一半进行交换,组成couping affine
x0, x1 = torch.split(x, x.size(1) // 2, dim=1)
x = torch.cat([x1, x0], dim=1)
return x
class Flow(nn.Module):
def __init__(self, channels, hidden_channels, n_flows=4):
super().__init__()
self.flows = nn.ModuleList()
for i in range(n_flows):
self.flows.append(CouplingLayer(channels, hidden_channels))
self.flows.append(Flip())
def forward(self, x, reverse=False):
if reverse:
for flow in reversed(self.flows):
x = flow(x, reverse=reverse)
else:
for flow in self.flows:
x = flow(x, reverse=reverse)
return x整体模型
class Autoencoder(nn.Module):
def __init__(self):
super(Autoencoder, self).__init__()
self.encoder = nn.Sequential(
nn.Conv2d(1, 32, kernel_size=4, stride=2, padding=1), # 32x14x14
nn.ReLU(),
nn.Conv2d(32, 64, kernel_size=4, stride=2, padding=1), # 64x7x7
nn.ReLU(),
nn.Flatten(),
nn.Linear(64 * 7 * 7, 128), # Latent vector
nn.ReLU()
)
self.flow = Flow(channels=128, hidden_channels=256,n_flows=4)
self.decoder = nn.Sequential(
nn.Linear(128, 64 * 7 * 7),
nn.ReLU(),
nn.Unflatten(1, (64, 7, 7)),
nn.ConvTranspose2d(64, 32, kernel_size=4, stride=2, padding=1), # 32x14x14
nn.ReLU(),
nn.ConvTranspose2d(32, 1, kernel_size=4, stride=2, padding=1), # 1x28x28
nn.Sigmoid()
)
def forward(self, x):
x = self.encoder(x)
x = self.flow(x)
x = self.decoder(x)
return x训练代码
def train_autoencoder(model, dataloader, num_epochs=10, lr=1e-3):
criterion = nn.MSELoss()
optimizer = optim.Adam(model.parameters(), lr=lr)
model.train()
for epoch in range(num_epochs):
for data in dataloader:
inputs, _ = data
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, inputs)
loss.backward()
optimizer.step()
print(f'Epoch [{epoch + 1}/{num_epochs}], Loss: {loss.item():.4f}')
evaluate_autoencoder(model, dataloader, output_dir='output_images', epoch=epoch)
def evaluate_autoencoder(model, dataloader, output_dir='output_images', epoch=None):
if not os.path.exists(output_dir):
os.makedirs(output_dir)
model.eval()
with torch.no_grad():
for i, (inputs, _) in enumerate(dataloader):
outputs = model(inputs)
if i == 0:
input_grid = vutils.make_grid(inputs, nrow=8, normalize=True)
output_grid = vutils.make_grid(outputs, nrow=8, normalize=True)
if epoch is not None:
vutils.save_image(input_grid, os.path.join(output_dir, f'inputs_epoch_{epoch + 1}.png'))
vutils.save_image(output_grid, os.path.join(output_dir, f'reconstructions_epoch_{epoch + 1}.png'))
else:
vutils.save_image(input_grid, os.path.join(output_dir, 'inputs.png'))
vutils.save_image(output_grid, os.path.join(output_dir, 'reconstructions.png'))
break
transform = transforms.Compose([transforms.ToTensor()])
mnist_dataset = torchvision.datasets.MNIST(root='mnist_data', train=True, download=True, transform=transform)
dataloader = torch.utils.data.DataLoader(mnist_dataset, batch_size=64, shuffle=True)
model = Autoencoder()
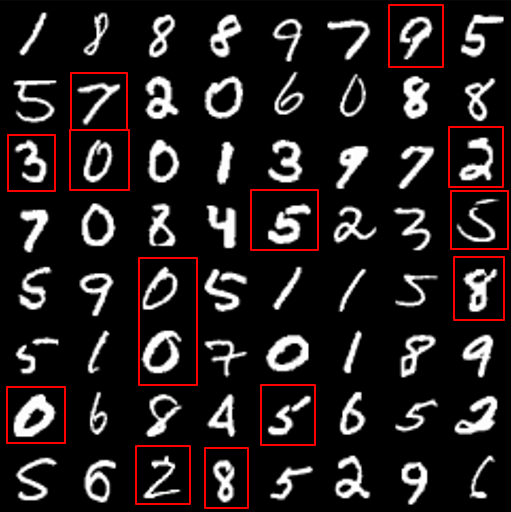
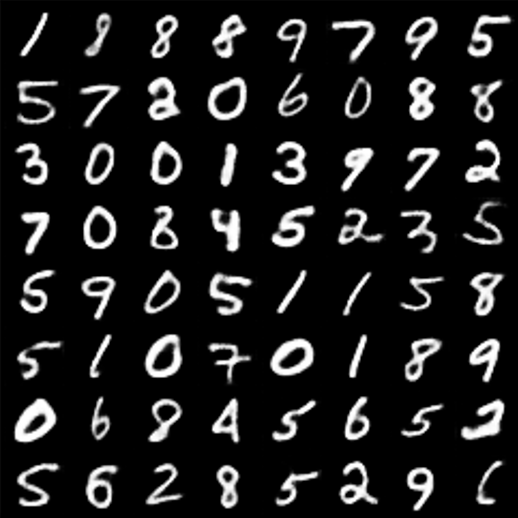
train_autoencoder(model, dataloader, num_epochs=10)生成效果
上为真实图片,下为生成的效果